SplattingAvatar-论文笔记
SplattingAvatar: Realistic Real-Time Human Avatars with Mesh-Embedded Gaussian Splatting
CVPR 2024
Abstract
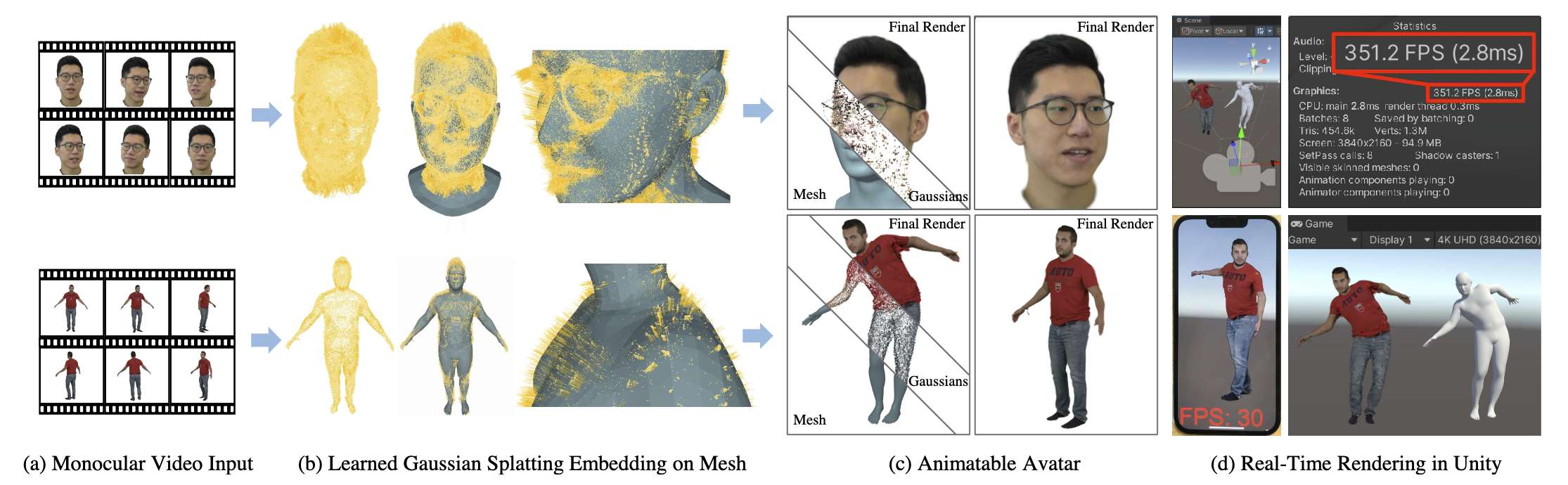
我们展示了 SplattingAvatar,这是一种在三角形网格上嵌入 3DGS 的逼真数字人的混合 3D 表现形式,在现代 GPU 上的渲染速度超过 300 FPS,在移动设备上的渲染速度为 30 FPS。我们通过显式网格和隐式高斯进行拼接建模,将数字人的运动和外观分离开来。高斯由三角形网格上的重心坐标和位移定义为 Phong Surface。我们通过改进 Lifted Optimiaztion 方法,在三角形网格上 walking 的同时优化高斯参数。SplattingAvatar 是数字人的混合表现形式,其中网格代表低频运动和表面变形,而高斯则代表高频几何和细节外观。现有的变形方法依赖于基于 MLP 的线性混合蒙皮 (LBS) 来表示运动,与之不同的是,我们直接通过网格来控制高斯的旋转和平移,这就增强了它与各种动画技术 (如骨骼动画、混合形状和网格编辑) 的兼容性。SplattingAvatar 可通过单目视频对全身和头部进行训练,在多个数据集上显示出一流的渲染质量。
Introduction
本文提出用可训练的 mesh 的 embedding 来显示控制高斯,将 mesh 表示为 Phong surface,embedding 表示为 ,其中 表示第 个 mesh 的重心坐标在 embedding 上的位置, 表示沿着法向量方向的位移。
本文的主要贡献:
- 本文介绍了一种将 3DGS 与 mesh 整合在一起的框架,它提供了一种新的数字人表现形式,既逼真又能提高计算效率。
- 本文使用 lifted optimization 来优化数字人模型,允许对高斯参数和 mesh embeddings 进行联合优化,以实现精确的重建。
- 本文通过综合评估和 Unity,展示了实时渲染的能力和创建各种数字人的泛化性。
Method
Overview
在单目图像序列中,每张图像都有一个 registered 的 mesh 模板,即 SMPLX 或 FLAME,本文将数字人混合表示为嵌入在 mesh 上的 3D 高斯。高斯的参数包括位置、旋转、比例、颜色和不透明度,它们是半透明的 3D 粒子,通过基于 splatting 的光栅化技术呈现在摄像机视图中。
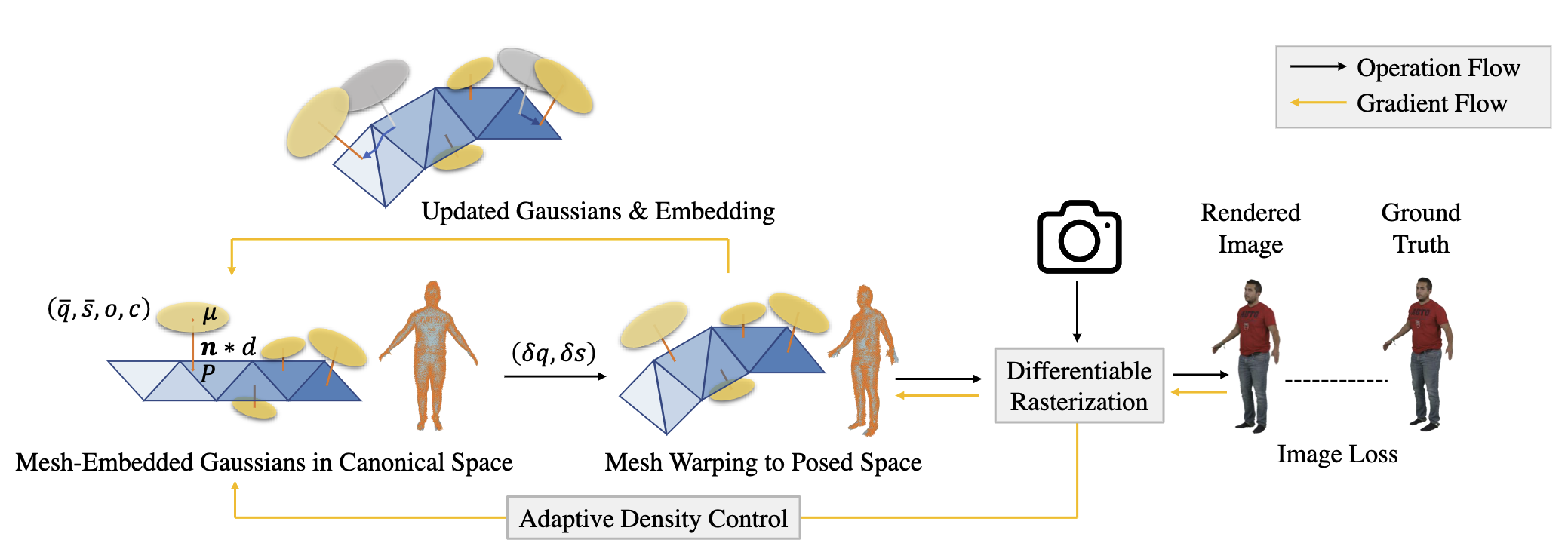
每个 3D 高斯以其局部 坐标嵌入到标准 mesh 的一个三角形上。embedding 直接定义了高斯在标准空间和 pose 空间中的位置。除位置外,每个高斯都有自己的旋转、缩放、颜色和不透明度参数。当 mesh 通过动画变形时,embedding 也会为每个高斯提供额外的旋转和缩放参数。与姿势相关的额外旋转由每个顶点四元数的重心插值定义,而额外缩放则由嵌入三角形的面积变化定义。
在优化过程中,高斯参数和 embedding 参数同时更新。当 的更新使 embedding 跨越三角形边界时,重心会在邻近的三角形中重新计算,就像高斯在网格上行走一样。为了支持 embedding,本文调整了原版 3D 高斯的 clone 和 split 策略。
Embedding on mesh
Phong surface 把一个点的 position 和 normal 定义在三角形里。对于三角形 上的点 ,重心坐标为 ,它的 position 和 normal 是三角形顶点 和每个顶点的法向量 的线性插值:
把高斯基元的位置即均值 定义为点 沿着法向量方向位移 :
把 embedding 近似为 mesh 表面周围的一阶连续空间。
对于某一帧标准空间和 pose 空间中的三角形,根据三角形的切线、双切线 (bitangent) 和法线计算矩阵 ,求出三角形从标准空间到 pose 空间的旋转。然后将旋转矩阵转换为四元数,并根据周围邻近三角形的面积加权平均值计算每个顶点的四元数 :
- 表示顶点 的相邻三角形
- 和 分别是三角形的面积和四元数
对于第 t 帧的 embedding ,将重心旋转插值四元数 乘以标准空间的高斯的旋转四元数 ,最后得到 的旋转四元数 :
- 表示 所在三角形三个顶点在第 帧的四元数
相同的操作也被用在缩放上,即用三角形的面积变化来表示变形引起的缩放:
本文省略了原版 3DGS 中的球谐函数。
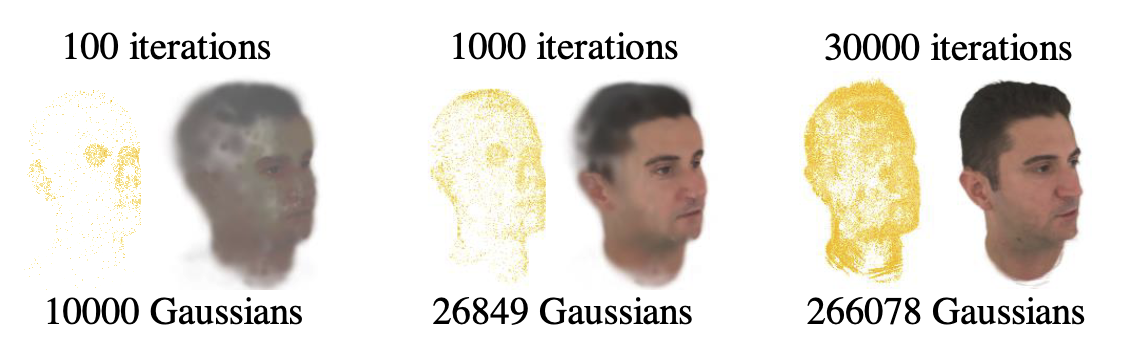
在标准空间的 mesh 上随机选取 10k 个三角形和重心坐标进行初始化,并将 初始化为 。高斯基元的位置通过 embedding 进行计算,其他属性还是和原版高斯一样。一开始高斯基元都在 mesh 的表面,随着训练的进行, embedding 会逐渐贴合几何表面,并且在纹理丰富的区域产生更多的高斯基元,图 3 展示了这个过程。
Differentiable rendering of Gaussian Splatting
由于单目视频的视角和姿态变化有限,本文提出了一个缩放正则化项,以防止高斯球变长变细。最后的光度损失是 、感知损失 和缩放正则项 之和:
- 表示高斯的缩放
- 和 分别表示最大和最小的缩放值
- 和 分别是缩放阈值和比例阈值
当 过长 (比 大) 或过细 (比 大) 的时候缩放正则项才会生效。
Walking on a triangle mesh
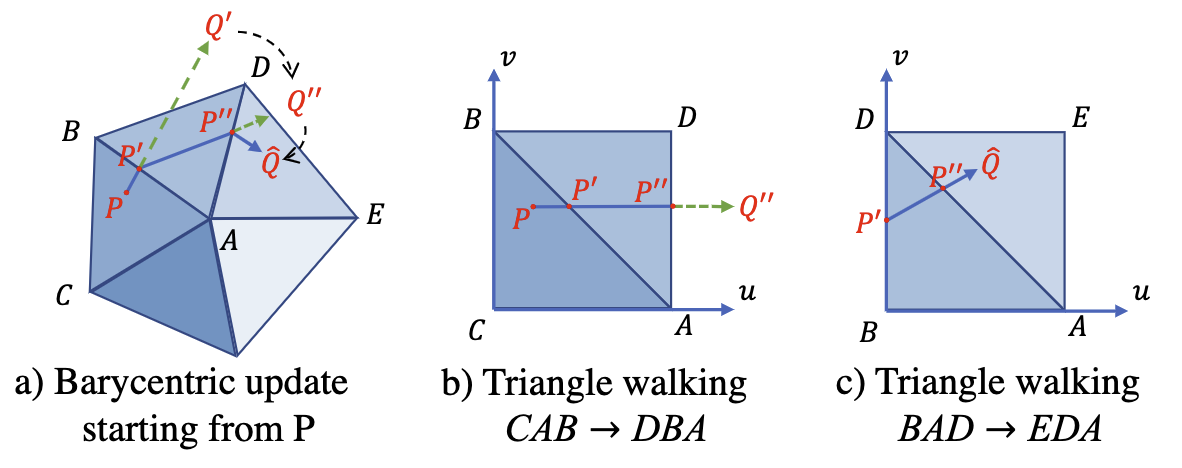
通过第 个三角形定义点 的重心坐标 ,当更新移动后的点 在第 个三角形外,则在第 个三角形和相邻第 个三角形共享的边上找一个点 ,并把剩余的移动重新表示在第 个三角形内为 。由于重心坐标与三角形的形状无关,在不失一般性的前提下,重新表示的方法是将两个相邻的三角形视为直角三角形,交点位于斜边上。更新会反复重新表示,直到在最终三角形内结束。整个过程如图 4 所示。
Reference:
[1]SplattingAvatar: Realistic Real-Time Human Avatars with Mesh-Embedded Gaussian Splatting
[2]The Phong Surface: Efficient 3D Model Fitting Using Lifted Optimization