PBNS-论文笔记
PBNS: Physically Based Neural Simulator for Unsupervised Garment Pose Space Deformation
TOG 2021

Abstract
我们提出了一种通过深度学习自动获取服装 pose 空间变形 (Pose Space Deformation, PSD) 的方法。经典方法依赖基于物理的模拟 (Physically Based Simulations, PBS) 来制作服装动画。这是一种通用的解决方案,只要对空间和时间进行足够精细的离散化,就能获得高度逼真的效果。然而,它们的计算成本很高,而且任何场景的修改都需要重新模拟。使用 PSD 的线性混合蒙皮 (LBS) 为 PBS 提供了一个轻量级的替代方案,不过它需要大量数据来学习适当的 PSD。我们建议使用深度学习,并将其表述为隐式 PBS,以无监督的方式学习受限场景中的真实布料 pose 空间变形:穿衣人体。此外,我们还展示了在与几个序列的 PBS 相当的时间内训练这些模型的可能性。据我们所知,我们是第一个提出布料神经模拟器的人。虽然该领域基于深度的方法正成为一种趋势,但这些模型对数据的需求量很大。此外,作者通常会提出复杂的公式,以便更好地从 PBS 数据中学习褶皱。监督学习会导致物理上不一致的预测,需要使用碰撞解法。同时,对 PBS 数据的依赖限制了这些解决方案的可扩展性,而它们的表述方式又阻碍了其适用性和兼容性。通过提出一种无监督方法来学习 LBS 模型的 PSD,我们克服了这两个缺点。研究结果表明,在动画中保持了服装一致性以及与姿势相关的服装褶皱。我们的解决方案非常高效,可以处理多层布料,允许在无监督的情况下调整服装尺寸,并可轻松应用于任何自定义 3D 数字人。
Introduction
主要贡献:
- 无监督 PSD 学习:通过在模型训练过程中强化物理一致性,我们消除了对 PBS 或扫描数据的依赖。因此,这种方法可应用于任意数量的服装、体形和姿势,而无需为获取它们的数据付出计算成本。
- 高效地训练、部署和兼容性:当前文献中基于深度学习的相关方法提出了复杂的公式,以获得真实的结果。这阻碍了训练过程和后期部署。我们提出的方法能生成 LBS 模型的混合形状,这是 3D 动画的标准,因此它能自动兼容所有图形引擎,提高了方法的适用性。
- 物理一致性:基于学习的相关方法无法预测无穿透的服装,因此需要进行碰撞处理才能用于实际应用。这就影响了实时性能,增加了调整这些解决方案所需的工程工作量,并消除了模型的可区分性,从而影响了它们在研究中的适用性。其中一些工作在训练过程中使用碰撞处理 loss 来缓解这一问题,但身体穿透现象依然存在。我们将展示这与监督训练的关系。另一方面,即使在极端的未知姿势下,PBNS 也能生成无穿透预测,从而有效地消除了后处理的需要。物理一致性不仅限于碰撞,还包括表面质量。受质量弹簧质点模型的启发,我们在预测中强制执行边缘和弯曲约束。这确保了服装没有扭曲的边缘 (这会产生纹理假象) 和光滑的表面。
- 多层服装之间的交互:我们首次提出了一种基于学习的方法,能够明确处理多层服装之间的交互。正因为如此,PBNS 是目前唯一一种能够将多层服装制作成完整复杂服装动画的方法。
Method
PBS Data and Physical Consistency
这里在说基于 PBS 的有监督学习算法的缺点,就不细讲。
Formulation
本文的目标是给出一个 LBS 模型的 pose,获取服装的 PSD,以便同时为服装和人体制作动画。给定 rest pose 下的服装模板 ,服装 PSD 的每个顶点定义为:
- 表示关节点
- 表示顶点 和关节点 之间的混合权重
- 是第 k 个关节点的线性变换矩阵
- 是轴角式表示的每个关节点相对于其父节点的旋转
- 和 分别表示 rest pose 下第 个服装顶点和该顶点在 pose 空间下的变形
需要为衣服找一个有效的混合蒙皮权重 和 PSD 的映射 , 表示标准空间下与人体对齐且不发生穿透的衣服顶点。
Blend Weight:服装顶点的蒙皮权重用距离服装最接近的人体上的点的蒙皮权重,对于裙子这类宽松的服装则用网络对蒙皮权重进行优化。
PSD:本文提出首先通过神经网络 来获取 pose 序列的高阶 embedding,然后用这些 embedding 和 PSD 矩阵 来获取最后的变形。这样可以建模从 到 的任意非线性映射,还可以控制矩阵 的大小。
Architecture
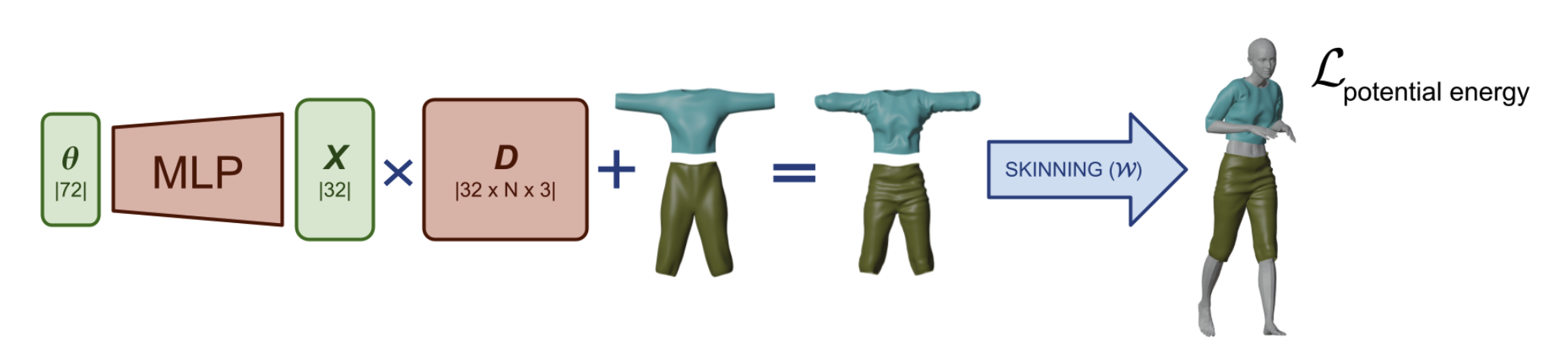
本文用 4 层的 MLP 来表示 ,通过给定 来得到最后服装的变形 :
- 是蒙皮方程
- 计算为
这个方法的整体 Pipeline 如图 2 所示,PSD 矩阵 也是通过学习得到的。
Training
物理系统是通过作用力 (其中 是整个系统的势能) 来进行隐式优化,本文则是将势能定义为 loss 来对神经网络进行优化。通过这种方式,模型就能学习到预测一致、能量最小化且稳定的结果。将全部的 loss (或者也可以认为是势能) 定义为:
- 表示衣服的弹簧势能,来指导模型预测服装一致的 mesh
- 表示身体与衣服的穿透所产生的势能,其梯度会将衣服顶点推到不穿透的位置
- 表示重力势能
- 来限制所选顶点的变形 (这是受到 PBS 的启发)
Cloth consistency:
- 是预测出来的边的长度, 是服装上其余边的长度 ( 是边的数量)
- 是面的法向量 ( 是面的数量)
- 是 Laplace-Beltrami 算子
保证衣服不会过度拉伸或者压缩,它被定义为系统的弹性势能,其梯度就像力一样。 来保证衣服的局部光滑。
Collisions:
- 表示服装上和身体上的最相邻顶点的对应关系, 是这些关系的集合;
- 表示身体上第 个顶点指向衣服上第 个顶点的向量
- 是第 个顶点的法向量
- 是提升鲁棒性的阈值,用来控制服装和人体之间的距离,取 4 mm
Cloth-to-cloth:简单一句话概括就是迭代地对每一层服装应用公式 5。
Gravity:物理中重力势能 ,因为 和 是常量,可以把重力损失理解为 ,换句话来说就是最小化衣服每个顶点的 坐标。
Pinning:对于某些服装,我们希望某些顶点不要移动。例如,随着训练的进行,下半身服装可能会因重力损失而掉落。我们希望限制腰部顶点的变形,使其保持在原来的位置。因此本文对每个顶点的变形 施加了 L2 损失:
- 当顶点 是固定的则 否则
如果顶点完全不动则可能还会和身体发生穿透,所以固定的顶点也需要稍微发生一点移动,因此设定 。
将 和 看作是物理量,其对应的 loss 权重和织物的属性直接相关:杨氏模量表示弹性,质量表示重力。其余的 loss 则是对基层物理的简化。
Reference
[1]PBNS: Physically Based Neural Simulator for Unsupervised Garment Pose Space Deformation