HOOD-论文笔记
HOOD: Hierarchical Graphs for Generalized Modelling of Clothing Dynamics
CVPR 2023

Abstract
我们提出了一种利用图神经网络、多层次信息传递和无监督训练的方法,以实现对现实服装动态的有效预测。现有的基于线性混合蒙皮的方法必须针对特定的服装进行训练,而我们的方法,称为HOOD,与体型无关,适用于紧身和宽松的服装以及自由流动的服装。此外,HOOD 可以处理拓扑结构 (例如,带有纽扣或拉链的服装) 和材料属性的变化。作为一个关键贡献,我们提出了一种分层的消息传递方案,该方案在保留局部细节的同时有效地传播刚性拉伸模式。我们的经验表明 HOOD 在数量上优于 baseline,并且仿真结果比 SOTA 更真实。
Introduction
传统的物理仿真方法虽然能取得很好的效果,但是时间开销大,无法实现实时应用。基于深度学习的方法在紧身的衣服上表现不错,但是在宽松衣服上效果不好。并且只能对特定训练好的衣服有不错的效果,泛化能力差。本文提出了一个新的基于图神经网络 (GNNs) 来无监督地训练和预测服装动态的方法。通过 GNN 来推测局部运动,力和加速度之间的映射关系,因为预测的是局部的运动,因此提高了泛化能力。
GNN 通过局部变换和消息传递在网格中传播信号,但由于消息传递的步骤是有限的,信号传播范围被限制。这对服装仿真来说是个挑战,因为服装的弹性波会快速传播,如果信号传播不足,可能会导致布料看起来像橡胶一样过度拉伸。尽管增加消息传递的次数可以解决这个问题,但会导致计算时间增加,且由于网格分辨率不确定,很难预设合适的传递次数。
本文通过在不同分辨率之间交替进行消息传递,成功解决了布料模拟中快速传播波引起的长距离耦合问题。通过将全局和局部信息分开处理,它既提高了计算效率,又增强了对局部细节的捕捉。
本文的主要贡献:
- 可高效预测各种服装的物理真实动态运动
- 可泛化到训练期间未见的新服装类型和形状
- 可在运行时改变材料属性和服装尺寸
- 支持动态拓扑变化,如打开拉链或解开衬衫扣子
Method

本文通过图神经网络将服装与仿真解耦学习布料的局部动态,通过分层消息传递能够有效地捕获布料的长距离耦合,最后利用基于物理的损失函数实现自监督训练。
Background
HOOD 是建立在 MeshGraphNets 基础上的 GNN,网络训练好了之后就可以通过顶点当前的位置和速度预测出加速度,进而推进服装的 mesh。
Basic Structure
本文将服装的动态基于图来建模,图由服装 mesh 的顶点和边以及身体边 (body edges) 组成。
身体边的定义:每个服装顶点都找一个距离最近的身体上的点,这两点之间的距离如果小于阈值就是身体边。
顶点和边会赋予特征向量 以及 ( 和 是节点的坐标)。节点的特征向量由类型值 (服装或人体)、当前状态变量 (速度、法向量) 和物理属性 (质量) 组成。边的特征向量存储了两个节点之间的相对位置,既与当前状态有关,也与服装的标准几何形状有关。
Message Passing
为了使系统向前发展,本文在输入图上应用了 N 个信息传递步骤。在每一步中,边缘特征首先按以下方式更新:
- 表示一个 MLP
节点后续会根据入射边的特征的均质进行更新,表示为 :
- 表示另一个 MLP
- 表示身体边
虽然对所有节点使用相同的MLP,但每组边都由单独的MLP处理。在 N 个消息传递步骤之后,节点特征被传递到解码器 MLP 中以获得每个顶点的加速度,然后用于计算步骤结束的速度和位置。
Extensions for Clothing
为了能够模拟不同种类的布料以及多材质组合的服装,本文将每个节点和边的特征向量中添加了局部材质参数,包括:杨氏模量和泊松比 (这两个参数会被映射为 Lamé 参数 和 ) 来分别描述材料的拉伸抗性和区域保持性;弯曲系数 用来惩罚布料的折叠和褶皱;以及布料的密度来定义布料的重量。
Hierarchical Message Passing
织物材料具有足够的刚度,因此施加在某一位置的力会迅速传遍整个服装。然而,当使用固定数量的信息传递步长时,在给定的时间步长内,力只能在有限的半径范围内传播。因此,如果信息传递步数太少,服装就会显得过于有弹性和橡胶一样。本文通过扩展 MeshGraphNets 来加速信号传播,从而解决了这一问题。为此,从平面输入图中构建了一个分层图表示法,并利用它在信息传递过程中加速信号传播。
Hierarchical Graph Construction
要让信息在单步内传的更远,需要在节点之间建立长距离的连接,为此,通过一个简单而有效的递归过程对给定的输入图进行递归粗化,以获得分层表示。具体来说,将输入图的节点连续划分为更粗的集合,这样节点间距离 (两个节点之间最短路径的边数) 就会增加。然后,为每个分区创建新的粗化边集合。
通过递归应用这种算法,可以得到一个被嵌套的层次图,其中每个较粗层次的节点都是下一个较细层次节点的适当子集,即 。这一特性对多层信息传递方案非常重要,将在下文中进行描述。
Multi-level Message Passing
嵌套分层图表示法可通过在多层次上同时进行处理来加速信息传递。为此,为图中的每个层级 赋予了自己的边特征向量 ,而节点特征向量 则在所有层级中共享。在每个信息传递步骤开始时,首先使用最底层的节点特征更新所有层的边特征:
- 表示 层的 MPL
然后节点特征更新为:
在每个信息传递步骤中,都会更新身体边 ,只保留那些与当前处理的服装节点相连的边。
这种方案的重要优势在于,它不需要任何显式平均或插值运算符来进行层级间传输。由于分层图具有嵌套特性,因此节点可以跨层共享,而且所有信息传递都是通过在每个信息传递步骤结束时处理 MLP 来隐式实现的。
多层次信息传递方案可以同时在任意数量的层次上运行。图 3 所示的类似 UNet 的架构具有三级层次结构,同时在两个相邻的层次上进行信息传递,在推理时间和结果质量之间实现了权衡。
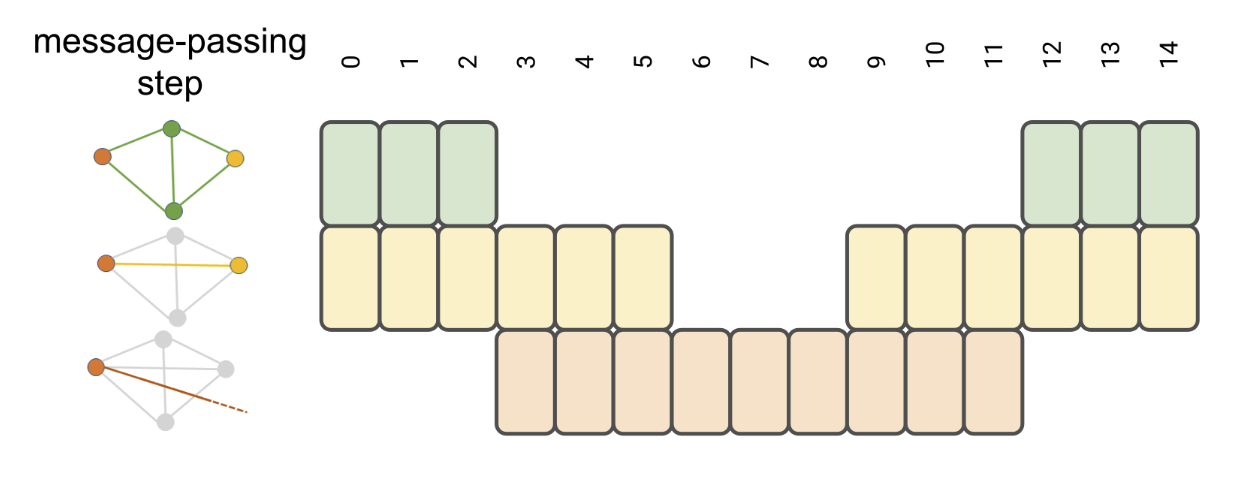
为了计算多级信息传递方案的传播半径,本文将信息在每个信息传递步骤中的最大传播距离相加。在计算量大致相同的情况下,多层的架构产生的传播半径为 48 条边,而单级方案为 15 条边。
Garment Model
要了解服装的动力学特性,必须对其机械行为进行建模,即内部变形和弹性能量之间的关系,以及和身体的摩擦和接触。本文的方法遵循布料仿真的标准做法:使用三角有限元和 St. Venant–Kirchhoff 材料模型,通过能量 建立抗拉伸模型。 是对离散曲率变化的惩罚,它是相邻三角形之间二面角的函数。为了防止布料与人体之间的相互穿透,当服装节点与其在身体网格上最近点的距离低于某个阈值时,使用三次能量项 来惩罚服装节点与人体网格上最近点之间的负距离。此外, 是一个能量项,其关于下一个时间帧 的梯度产生惯性力。最后,引入了一个摩擦项 ,用于惩罚服装节点在身体上的切向运动。
最后建立一个服装随时间变化的能量模型:
- 、 和 分别表示上一帧、当前帧和下一帧的节点位置
最小化 与步骤结束位置的关系等同于求解隐式欧拉方程,为前向模拟提供了一种稳健的方法。在训练过程中作为损失使用时,这种增量势能允许网络在没有监督的情况下学习服装的动态。
Reference
[1]HOOD: Hierarchical Graphs for Generalized Modelling of Clothing Dynamics